

This was one of the most "life-altering" experiences I have ever embarked on. Along with the challenges we faced it was wonderful to learn about new cultures, traditions, and let go of stereotypes I might've held unintentionally. I really got to learn: how to be a team leader and coordinator, and managed to work with a variety of individuals from policemen to motorists.
Summer Research
Every summer NYUAD students perform research both in Abu Dhabi and at other universities and centers around the world. Competitive grants are available to support students in their research pursuits and students may also be funded by their faculty supervisor.
Lending a Helping Hand With the Local Economy in Kumawu
The Center for Technology and Economic Development (CTED) organizes summer trips to Kumawu, a small town in Ghana, where students work with the local population and develop apps to help improve their lives and livelihoods.
Case Studies

Effect of Tourism on Female Financial Emancipation in Northern Pakistan
Ahmad Kiyani, Class of 2024 aimed to observe and discover different factors at play that led females in the region of Gilgit Baltistan in Northern Pakistan to have some of the highest indicators of emancipation. This includes but is not limited to financial emancipation, political emancipation among others.
They wanted to see whether tourists flocking to the region either for mountaineering, paragliding, skiing or cultural expeditions affected the local female population and encouraged them to start their own businesses. They wanted to know whether the China Pakistan Economic Corridor and its significant infrastructure projects also played a role in the emancipation of local women. And at the moment our findings suggest that Tourism indeed has had a positive impact on key indicators of emancipation in the region.
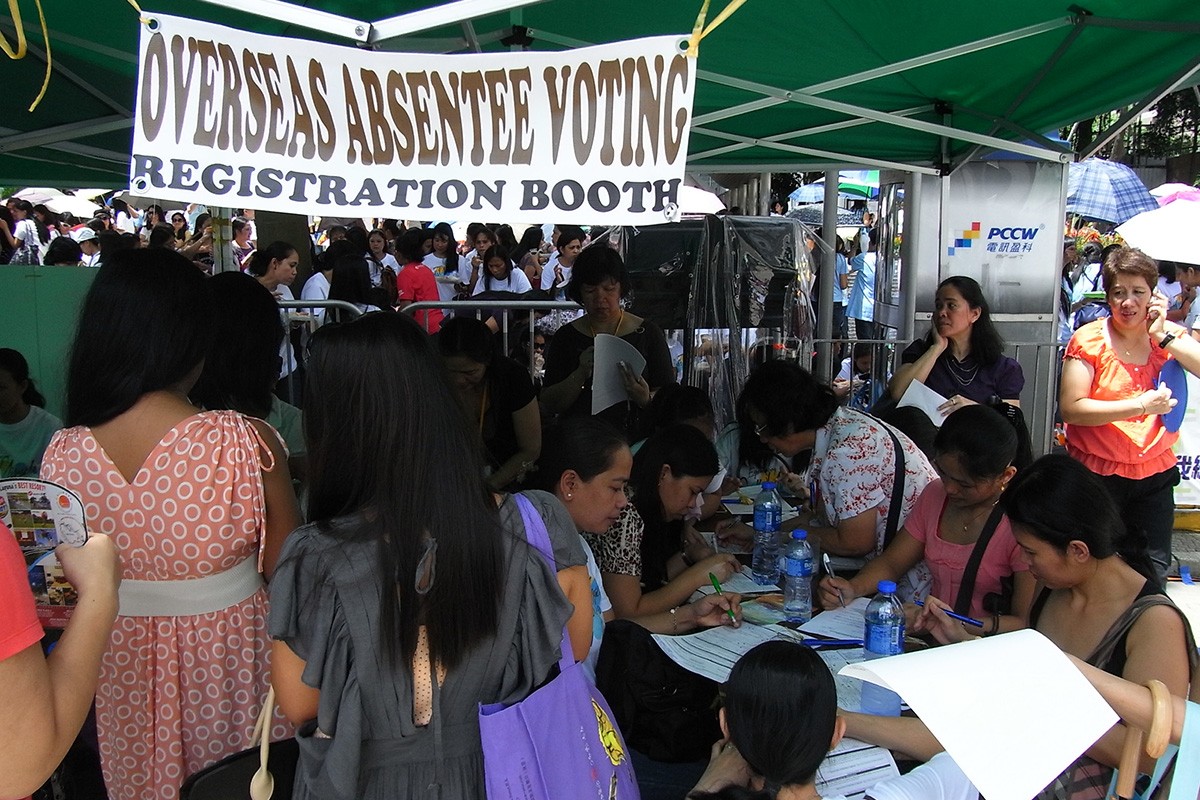
The Duty to Vote: Expatriate Populations and Electoral Politics
Dabbling with the topic of electoral politics in the Philippines, the research primarily evaluated the effects of global migration on voter turnout and the ramifications of increasing globalization on the way that expatriate populations conceive their ‘duty to vote’ and the ‘means’ through which they exercise this duty.
Segmenting the Filipino migrant population by profession, Aarushi Prasad, Class of 2025 conducted interviews with Filipino expats belonging to different socio-economic strata in Abu Dhabi probing into voter registration mechanisms, attitudes toward voting and the efforts made by the government to encourage their participation in the electoral process.
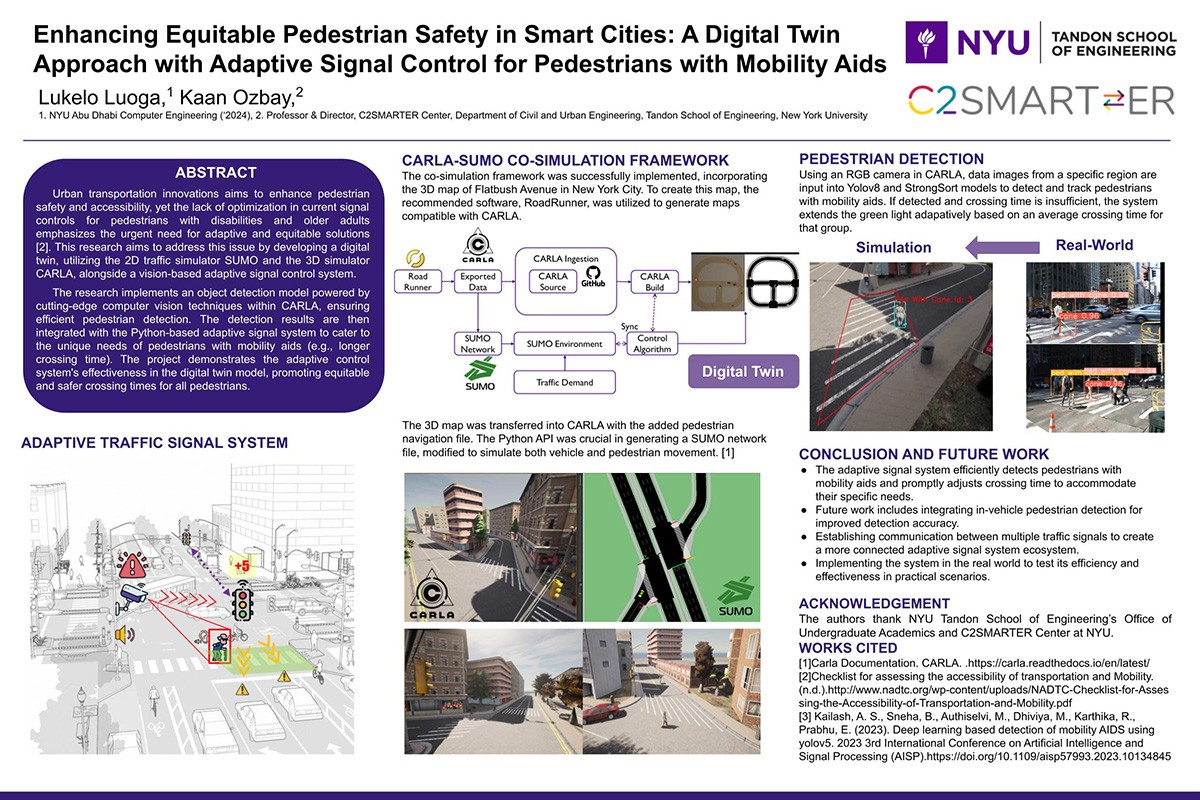
Enhancing Equitable Pedestrian Safety in Smart Cities: A Digital Twin Approach with Adaptive Signal Control for Pedestrians with Mobility Aids
Enhancing pedestrian safety and accessibility in smart cities is a crucial goal for modern transportation innovations. However, current pedestrian signal controls often lack optimization for individuals with disabilities and older adults, highlighting the urgent need for adaptive and equitable solutions.
Lukelo Luoga, Class of 2024 aimed to address this issue by developing a digital twin, utilizing the 2D traffic simulator SUMO and the 3D simulator CARLA, alongside a vision-based adaptive signal control system. The primary focus was enhancing pedestrian safety, particularly for those utilizing mobility aids. To achieve this, Lukelo built a beta version of a digital twin, enabling real-time vehicle and pedestrian input exchange between SUMO and the CARLA simulator.
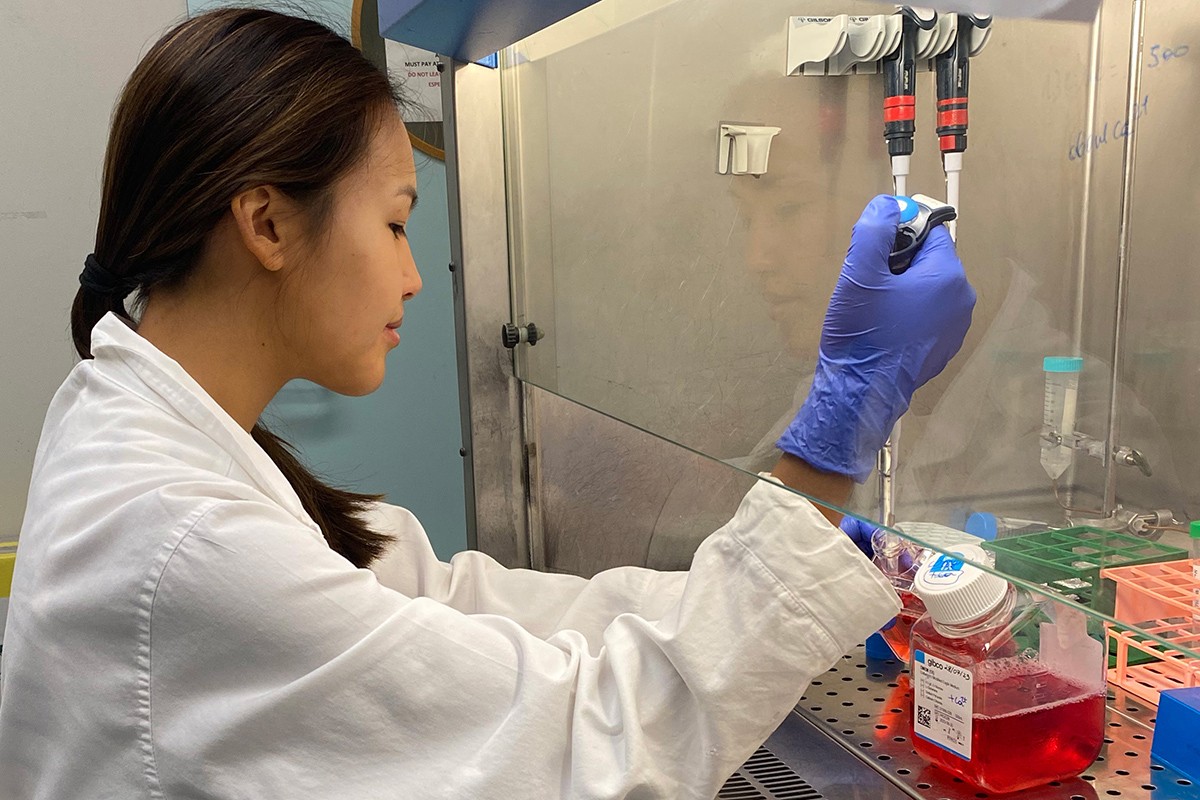
Investigating the effect of tunable mechanical loading on the proliferation of cancer cells in the Engineered Heart Tissue (EHT)
During her summer research experience at ICGEB, Tomiris Doskhozhina, Class of 2025 conducted an investigation at the crossroads of biophysics and tissue engineering.
Employing neonatal cardiomyocytes as an in-vitro model, Tomiris engineered cardiac tissue with spontaneous contractile capabilities. Within the context of tissue casting, she introduced lung carcinoma, melanoma, and colorectal cancer cells into this construct, aiming to gain insights into their growth dynamics.
Undergraduate Research Reports

News

Students Gain Valuable Insights During Summer Research Internships
Ten NYU Abu Dhabi students completed summer research internships in labs in Europe and Asia gaining experience in engineering and biotechnology research.

Bloom Like a Flower
The Mishra brothers’ dedication to work with underprivileged school children back home in Nepal is starting to blossom.