Research Clusters
CAIR focuses on fundamental research and applications in AI, robotics, and multi-agent systems with topics in sensor data processing, path planning, brain-machine interfaces, and safety. The research is organized around five main clusters.
Clusters
-
Multi-robot systems include the development of heterogeneous autonomous cooperative units (drones, quadrupeds, wheeled ground robots). This project also develops standalone units capable of exchanging information using RF and/or visual. Unmanned aerial vehicles (UAVs) with attached manipulators, hybrid aerial/ground/vessel systems, quadrupeds, and others perform distributed simultaneous localization and mapping (SLAM), followed by path planning algorithms in a cooperative manner (leader-follower configuration). The SLAM is achieved using LiDAR, RGB-D, thermal cameras, and acoustics sensors. Cooperative multi-copters for payload delivery and others are deployed in a GNSS-denied, obstacle-cluttered environment. Customized mobile surgical robots, VTOLs, and other omnidirectional drones are safely controlled to assist in several tasks.
Multi-robot systems include the development of heterogeneous autonomous cooperative units (drones, quadrupeds, wheeled ground robots). -
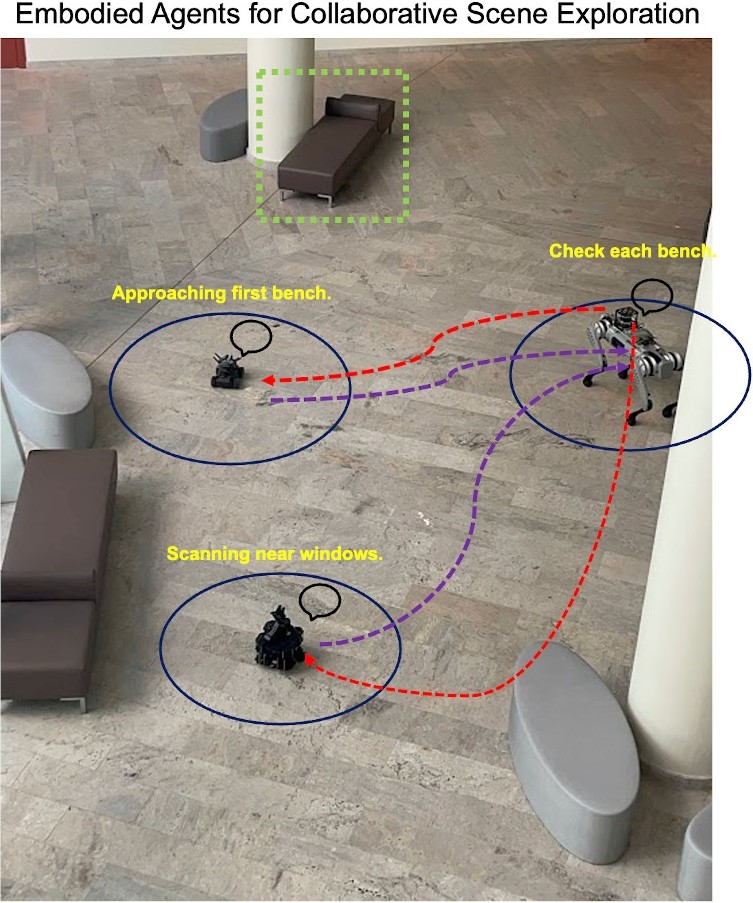
CAIR's second project pioneers in robotic perception, harnessing machine learning to revolutionize 3D scene understanding. Our cutting-edge technology facilitates 3D detection and semantic segmentation, propelling pivotal applications in robotics such as navigation and exploration. Currently, our research is devoted to integrating embodied AI, enhancing the autonomous capabilities of robotic agents. These agents are designed to intelligently interact with their environment, demonstrating robust autonomy and advanced intelligence. They can explore, reason, and execute tasks, adapting to dynamic surroundings and showcasing unparalleled intelligent interaction.
Embodied AI enables performing developmental tasks for the visual scene exploration of robotic agents. -
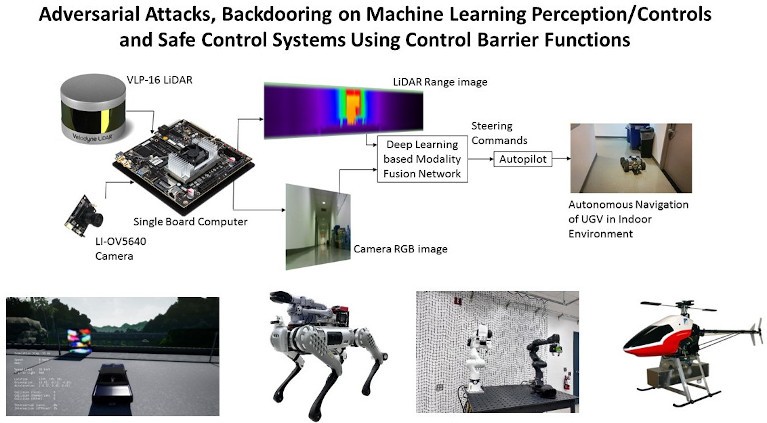
Algorithms for sensor processing and autonomous navigation of robotic systems in complex unstructured environments are attracting research interest with the emergence of more accurate and cheaper sensors, faster embedded computing, large datasets, and machine learning (ML) approaches. ML is widely used for both perception and end-to-end control for robust autonomy. These systems cannot be trained in all possible environments/conditions. They are also vulnerable to adversarial attacks including training-time attacks (e.g., backdoors in which triggers are embedded in training data by adversaries to cause incorrect classifications), data poisoning in on-line/lifelong learning systems (e.g., adversarial modifications of the environment causing learning spurious correlations), and inference-time adversarial perturbations. Guaranteeing/certifying performance of ML systems is challenging. In this project, we provide both white-box and black-box defenses for backdoor attacks. We consider training-time methods to certify robustness. Lipschitz networks are considered along with applications to tasks such as perceptual similarity scoring which plays a significant role in computer vision to capture the underlying semantics of images as well as in applications such as simultaneous localization and mapping (SLAM) in robotics and semantic SLAM. We will also consider instances of attacks and defenses in robotic applications using various sensors such as vision and LIDAR. Furthermore, for increased robustness of controls and robotic systems, we will develop control systems based on control barrier functions and robust nonlinear adaptive controls for provably safe dynamic operations. The project will include experimental implementations on various platforms (e.g., manipulators, autonomous vehicles, quadrupeds).
Machine learning is widely used for both perception and end-to-end control for robust autonomy, but these systems cannot be trained in all possible environments/conditions and they are also vulnerable to adversarial attacks. -
A key challenge in Human-Robot Interaction is to combine the accuracy and repeatability of robots with the cognitive skills of humans to perform cooperative tasks in unstructured, noisy, and dynamic environments. Machine learning models are utilized to develop cognitive interaction with robotic devices using brain imaging technologies such as Electroencephalography (EEG). C-HMI involving touch aims to understand the principles of haptic perception, action, and cognition and leverage said knowledge to develop cognitive interfaces to interact with virtual and/or real distant environments through the sense of touch and provision cognition-based AI and robotics applications such as supernumerary limbs and social robots.
Machine learning models are utilized to develop cognitive interaction with robotic devices using brain imaging technologies such as Electroencephalography (EEG). -
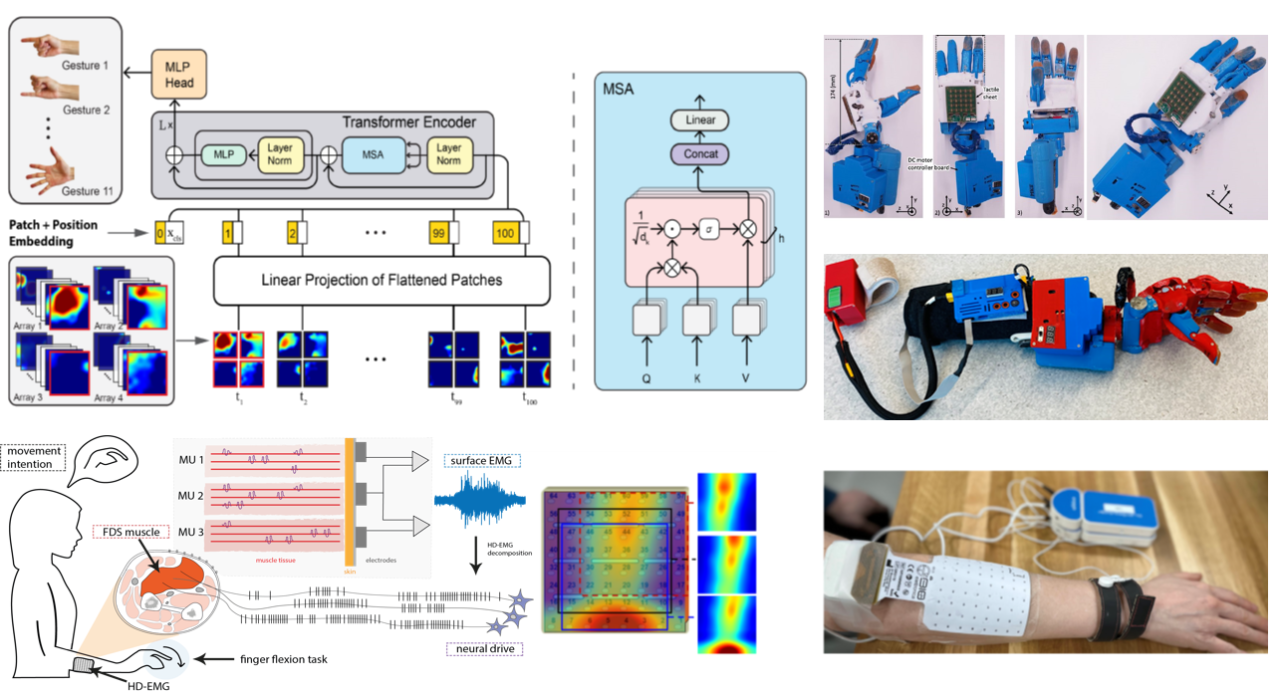
The project PI is S. Farokh Atashzar, and the Co-PIs are Farah Shamout and Tuka Alhanai. We aim to generate deep, scalable, and explainable learning modules to decode and process mixed biosignal time series (including high-density electromyography) from wearable sensors and neural interfaces. The ultimate goal is to (a) enhance the control of neurorobotics and (b) take the next step towards extended robotic reality by decoding the neural code of motion from the human nervous system. Problems to address are (a) decoding the transient phase of biosignals to boost the agility of control, (b) generalizing the performance of unseen subjects and unseen gestures, (c) minimizing the need for extended labeled datasets to train our neural controllers (d) reducing sensitivity to artifacts and sensor displacement/misplacement.
A view of the different applications CAIR is developing to decode and process mixed biosignal time series (including high-density electromyography) from wearable sensors and neural interfaces.

.")

Sub-Projects
Multi-agent Systems
-
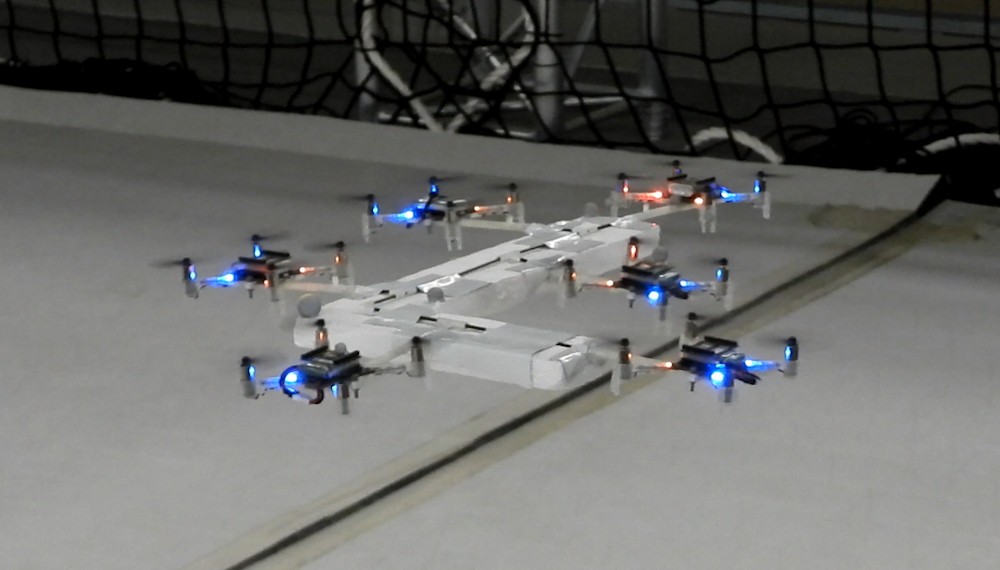
The goal of this project is the development of control methods allowing cooperative flight
using UAVs. The purpose is transportation of payloads too heavy or asymmetric for a
single UAV to transport, necessitating the use of cooperative control, in order for many
UAVs to operate as a unit. The same methods are further adapted for application in
aerial manipulators, for dexterous handling of transported payloads.Heavy and asymmetric payloads require many UAVs to operate as a unit, necessitating cooperative control -
Relevant Publications
Chaikalis, D., Evangeliou, N., Tzes, A., & Khorrami, F. (2022, June). Adaptive Control of Coupled-Multicopter Systems. In 2022 International Conference on Unmanned Aircraft Systems (ICUAS) (pp. 1375-1380). IEEE.
Chaikalis, D., Evangeliou, N., Tzes, A., & Khorrami, F. (2023, June). Decentralized Leader-Follower Visual Cooperative Package Transportation using Unmanned Aerial Manipulators. In 2023 European Control Conference (ECC) (pp. 1-5). IEEE.
Chaikalis, D., Evangeliou, N., Tzes, A., & Khorrami, F. (2023). Modular Multi-Copter Structure Control for Cooperative Aerial Cargo Transportation. Journal of Intelligent & Robotic Systems, 108(2), 31.
-
-
In order to present a solution for navigation in any environment, this project undertakes
the development of a vehicle capable of traversal in air, ground and on water surface.
This work is concerned with the complete bottom-up development of the proposed
solution, including design, manufacturing and control.The hybrid vehicle is able to traverse in ground, water, and air with ease -
Relevant Publications
Evangeliou, N., Chaikalis, D., Giakoumidis, N., & Tzes, A. (2023, February). Mechatronic Design of an Amphibious Drone. In 2023 9th International Conference on Automation, Robotics and Applications (ICARA) (pp. 230-233). IEEE.
Chaikalis, D., Evangeliou, N., Nabeel, M., Giakoumidis, N., & Tzes, A. (2023, June). Mechatronic Design and Control of a Hybrid Ground-Air-Water Autonomous Vehicle. In 2023 International Conference on Unmanned Aircraft Systems (ICUAS) (pp. 1337-1342). IEEE.
-
-
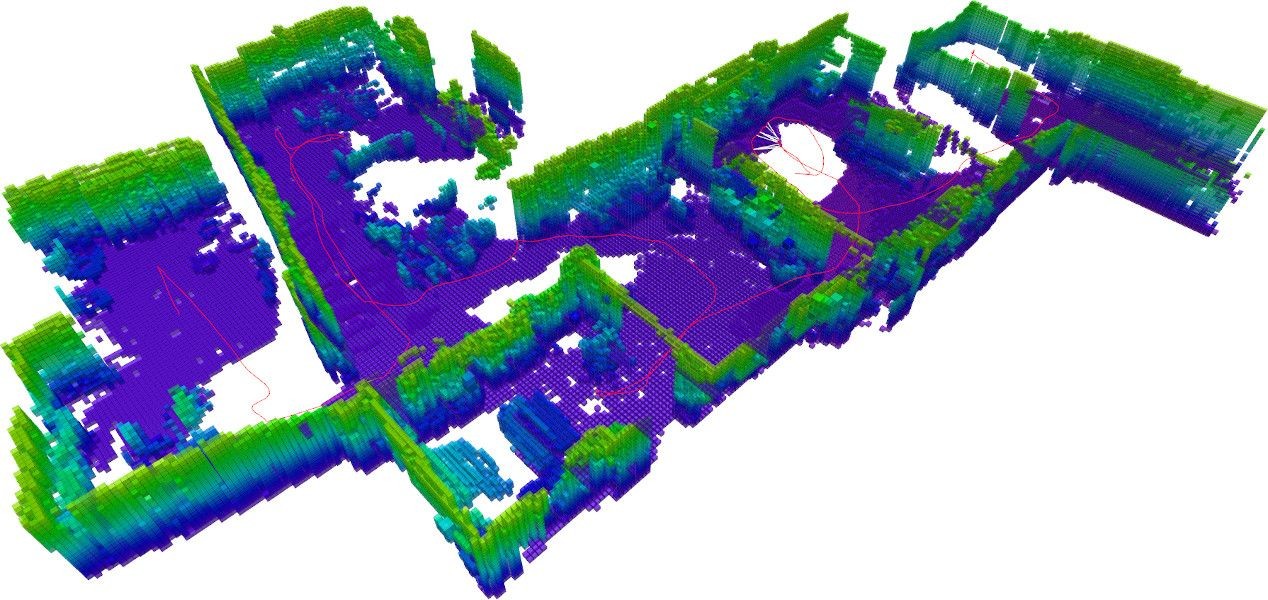
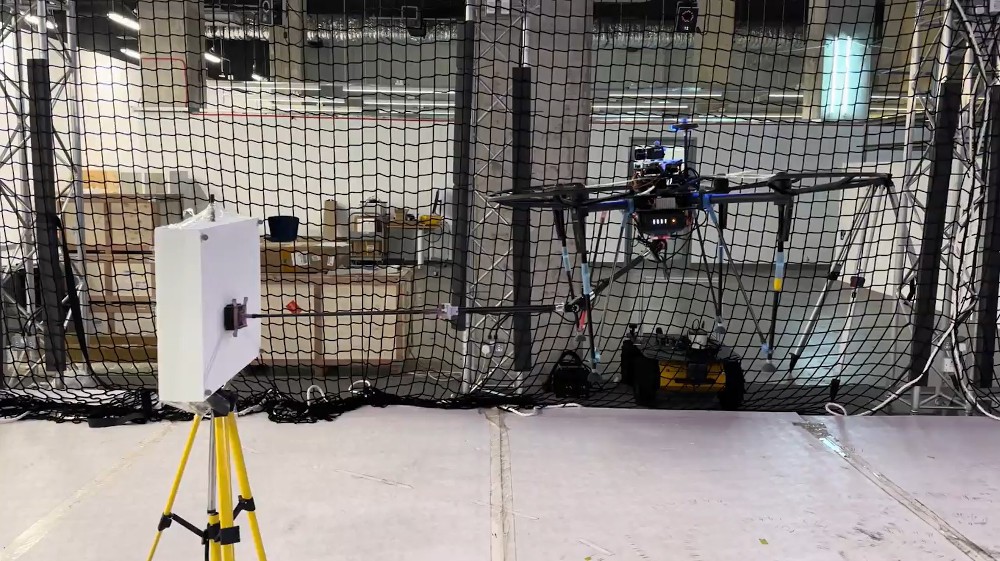
Unmanned aerial vehicles (UAVs) can be utilized in a variety of missions, such as search and
rescue or disaster response, where human involvement would put lives at risk. Since
such scenarios are typically in remote or indoor areas (no GNSS coverage), this project
aims for the development of sensor suites, localization and efficient navigation
algorithms, for UAVs to navigate previously unexplored areas using only local sensing.Disaster response robots automatically explore unknown regions without needing additional positioning infrastructure -
Relevant Publications
Unlu, H. U., Chaikalis, D., Tsoukalas, A., & Tzes, A. (2023, February). UAV-Navigation Using Map Slicing and Safe Path Computation. In 2023 9th International Conference on Automation, Robotics and Applications (ICARA) (pp. 208-212). IEEE.
Unlu, H. U., Chaikalis, D., Gonçalves, V., & Tzes, A. (2023). Control Barrier Functions and Lidar-Inertial Odometry for Safe Drone Navigation in GNSS-denied Environments. IntechOpen. doi: 10.5772/intechopen.1002654
Unlu, H. U., Chaikalis, D., Tsoukalas, A., & Tzes, A. (2023). UAV Indoor Exploration for Fire-Target Detection and Extinguishing. Journal of Intelligent & Robotic Systems, 108(3), 54.
-
-
Aerial vehicles equipped with robotic arms are capable of using their increased degrees
of freedom to operate as dexterous, agile agents. The aim of this project is to develop
controller frameworks, enabling such aerial workers to solve complex tasks in
constrained environments, such as manipulation (pick and place) or environment
interaction (force exertion, contact inspection).Special controller frameworks enable aerial workers to carry out complex tasks. -
Relevant Publications
Chaikalis, D., Khorrami, F., & Tzes, A. (2020, September). Adaptive Control Approaches for an Unmanned Aerial Manipulation System. In 2020 International Conference on Unmanned Aircraft Systems (ICUAS) (pp. 498-503). IEEE.
Chaikalis, D., Khorrami, F., & Tzes, A. (2023, December). Adaptive Control Approaches for an Unmanned Aerial Manipulation System. In 2023 21st International Conference on Advanced Robotics (ICAR) (to appear). IEEE.
Chaikalis, D., Gonçalves, V., Tzes, A. & Khorrami, F. (2024, May). Aerial Manipulator Force Control Using Control Barrier Functions. In 2024 International Conference on Robotics and Automation (ICRA) (under review). IEEE.
-

Human-machine Interfaces
-
The main aim of this project is to unravel the role of vision, touch and proprioception in the interactions between the human and the environment by using motion capture techniques.
Motion capture techniques enable understanding the role of vision, touch, and proprioception in human-environment interactions -
Relevant Publications
Camponogara, I., and Volcic, R. (2022). Visual Uncertainty Unveils the Distinct Role of Haptic Cues in Multisensory Grasping. eNeuro, 9(3), 1–12. doi: 10.1523/ENEURO.0079-22.2022
Derzsi, Z., and Volcic, R. (2023). Not only perception but also grasping actions can obey Weber’s law. Cognition, 237, 105465. doi: 10.1016/j.cognition.2023.105465
-
