
Containerized Digital Twin Platform for Indoor Environmental Quality Monitoring
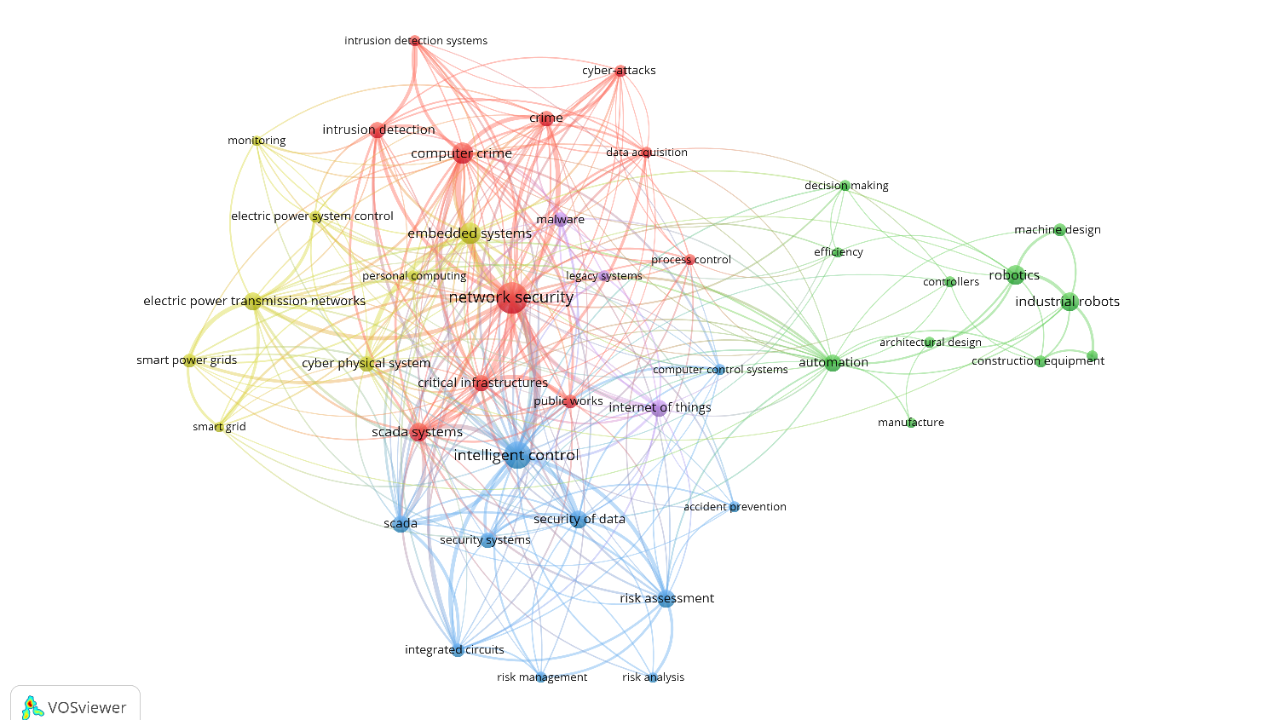
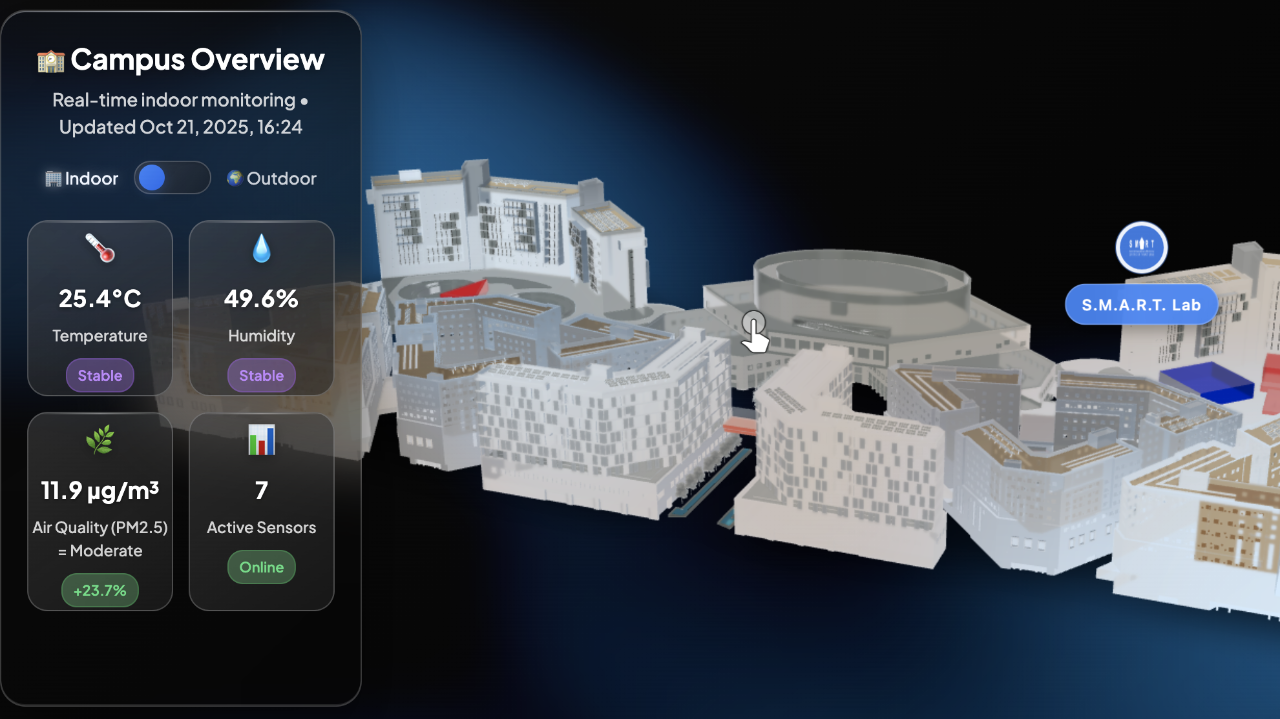
This project develops a containerized Digital Twin platform that integrates IoT sensors, 3D visualization, and advanced analytics for comprehensive Indoor Environmental Quality (IEQ) monitoring and Indoor Air Quality (IAQ) prediction. Its modular, Docker-based architecture enhances scalability, simplifies deployment, and enables cost-effective operation across diverse environments.
A proof-of-concept in a university campus office demonstrates real-time monitoring with descriptive analytics visualizing thermal, acoustic, and lighting comfort, as well as air quality, offering remote stakeholders holistic IEQ assessments. Predictive analytics enable 72-hour PM₂.₅ forecasting with an RMSE of 4.884, providing actionable insights for proactive environmental control.
The research project is led by Borja García de Soto, with Zihao Zheng overseeing system design and Juan Diego Castaño Molina contributing to platform development and predictive analytics. With the collaboration and support from SHORES and CITIES.